ON THE WAY

李照祥 Zhaoxiang
长江大学-本科
长江大学-硕士(保研)
物联网工程
计算机科学与技术
关于我
- ROS1 ROS2机器人爱好者
- 发展方向:机器人、自动驾驶
擅长
项目经验

基于ROS的移动机器人仿真教程
2020-至今
该作品是研究生就读期间远程兼职于COONEO时所创,基于阿克曼底盘(neor_mini)开发了丰富的Gazebo仿真实践教程,并且还独立完成了真车的底层软硬件。其中每一个章节都对应一篇微信推文或知乎博客,且多篇入选“知乎精选” 。
自动驾驶小车
2022.4 - 2022.11
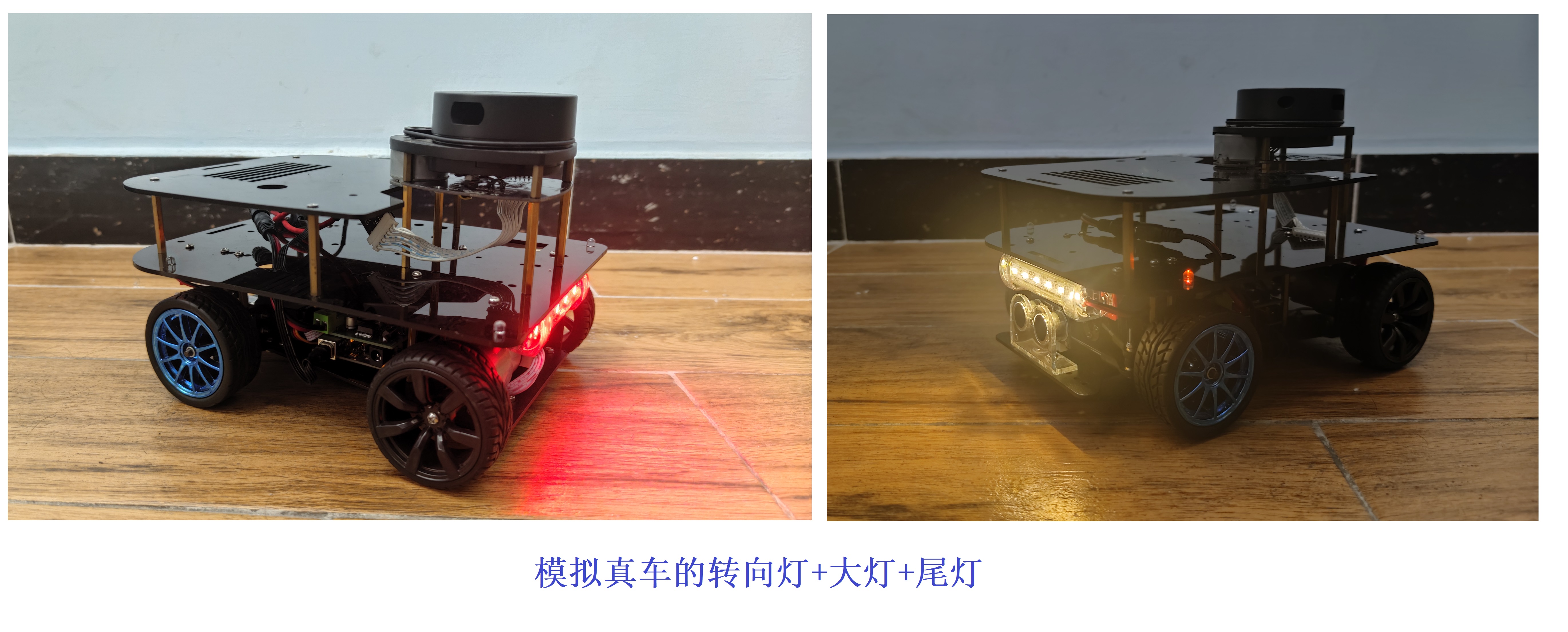
该项目由本人独立完成,包括详细的搭建教程和配套代码。自主设计、打板、焊接、测试Arduino mega 2560 的PCB扩展板、ROS1和Arduino端的代码实现、基于雷达定位的建图和导航、二自由度云台跟踪、视觉巡线、4路转向灯逻辑、前后灯光逻辑、对应CAD文件。
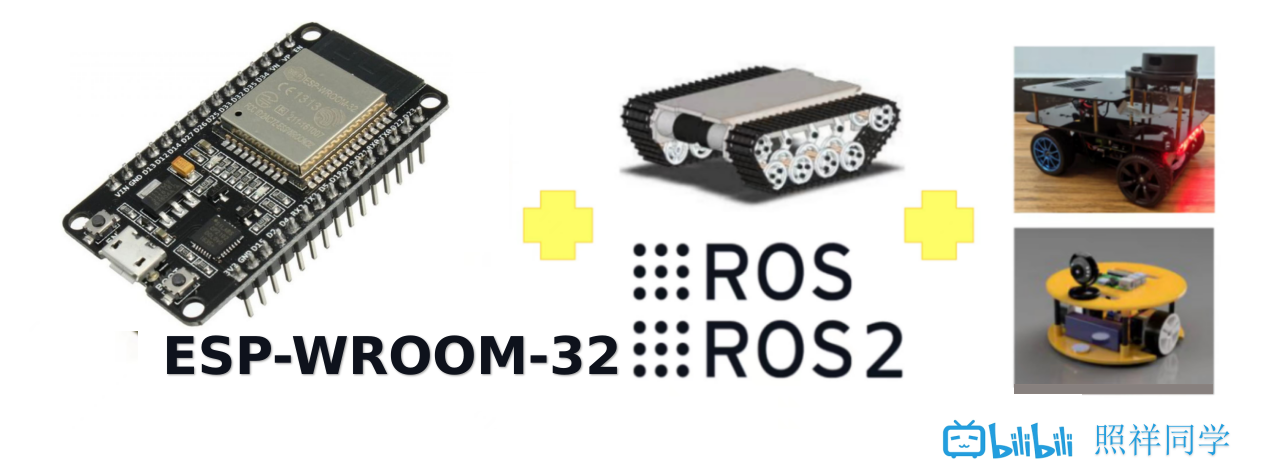
基于Esp32与ROS2的机器人
2023.4- 至今
该项目希望实现:基于ESP32作为ROS机器人底层控制器并设计一款集成2路编码电机驱动、5V/5A电源、舵机、IMU、GPS、模拟汽车灯光等接口的PCB扩展板;WIfi/蓝牙控制方式、配合服务器的远程控制及与之对应的代码;采用micro_ros_arduino的方式实现DDS通讯。
实习经历
2021.11 - 2022.11
Robotics X - 控制中心实习生 | 腾讯科技(深圳)有限公司
- 台阶上的位置可视化:结合动补系统 为机器⼈(Ollie)编写上台阶的Rviz可视化代码;
- 两轮轮腿式机器⼈稳定踏步功能开发 ⼊选Teg事业群对外展⽰机器⼈动作之⼀;
- 触觉传感器⼈机交互 ⼊选Teg事业群对外展⽰机器⼈动作之⼀;
- 论文一篇《Adaptive Optimal Output Regulation for Wheel-Legged Robot Ollie A Data-Driven Approach》;
- 发明专利3篇;
2019.11 - 2020.9
机器人软件开发实习生 | 酷牛创新技术(深圳)有限公司
- 移动底盘功能仿真:差速、阿克曼;
- 移动底盘真机驱动开发:差速、阿克曼、履带;
- 基于阿克曼底盘的应用开发:轮式/激光里程计建图、navigation、opencv视觉巡线、多路超声波避障、视觉云台跟踪;
- 4Dof码垛机械臂软硬件开发:Arduino mega 2560的步进电机控制、串口交互逻辑开发、连杆机械臂运动干涉补偿的实现;
- 码垛机械臂正逆向解算的推导和实现:分别基于几何法和D-H方法,有URDF和Gazebo的仿真、仿真和真机联动;
- Arduino mega 2560扩展板:适配阿克曼、差速、履带小车。可驱动2路霍尔直流减速电机、4路PWM舵机、自带5V/3A电源、6路LED接口、PPM接收机解码;
- 论文一篇《基于几何法的码垛机械臂逆向求解》;
上述内容在实习和后期远程兼职期间完成,均为独立完成。
2019.8 - 2020.11
机器人软件开发实习生 | 武汉木神机器人有限公司
- 学习差速底盘正逆向解算并代码实现;
- 学习并在差速底盘上实现Gmapping、navigation等ROS开源功能;
- 学习ROS-QT并为公司的四轮差速底盘开发了一个QT上位机界面;